
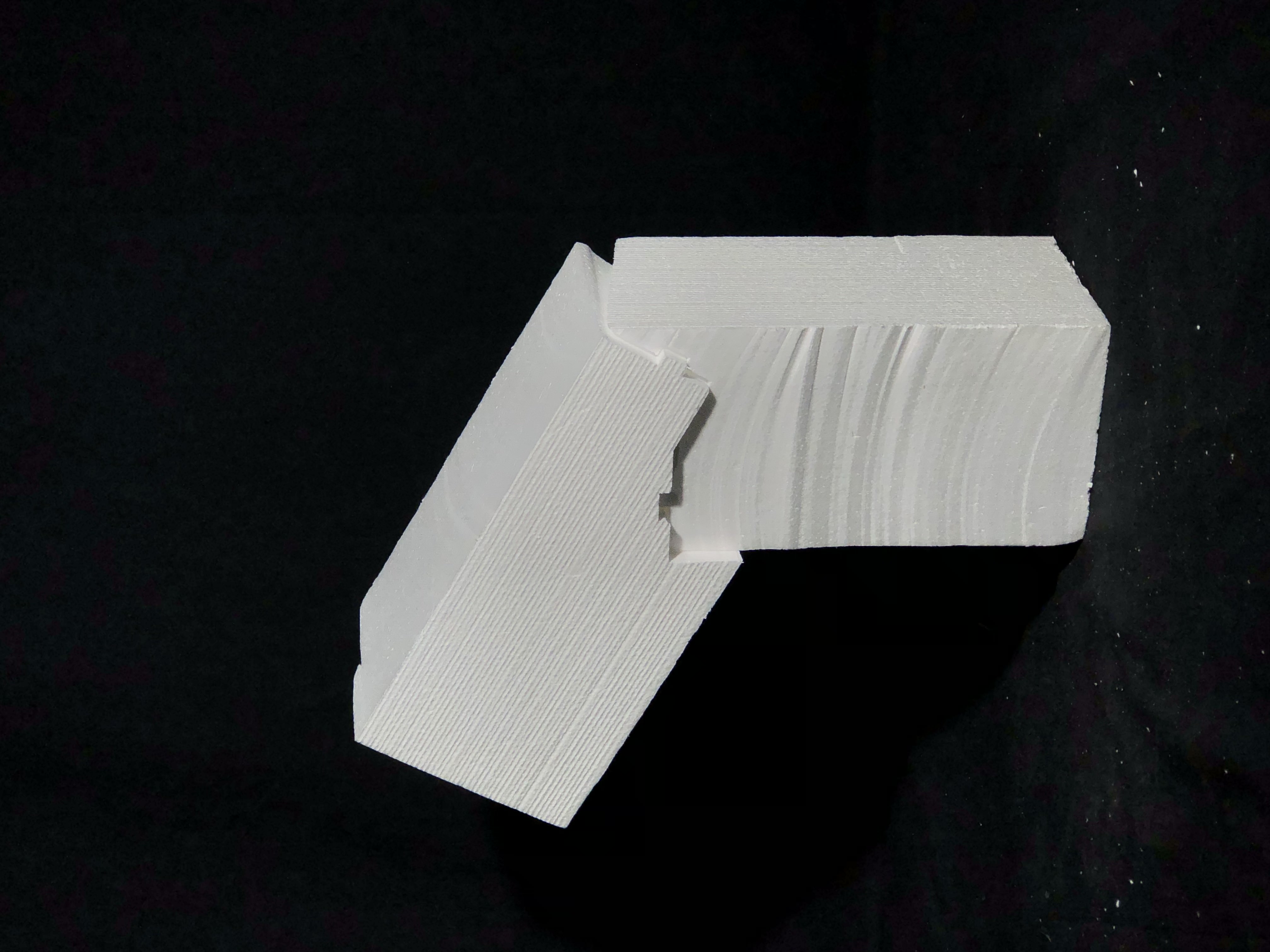
Robotically manufactured self interlocking joinery
Stereotomy is an ancient craft that relied heavily on time-intensive manual processes. Digital, modern stereotomy is an evolution that reduces time needed and opens up opportunities for more complex geometric explorations. To achieve the outlined ambitions for the design and construction of complex modern stereotomic joints, a prototype grasshopper script and physical robot fabrication workflow were established. There have been examples of site fabrication and assembly attempts in architecture. One case in point is the in situ Fabricator by ETH. The team aims to move the robot to the construction site. To construct a curvilinear mesh structure, a camera on the end effector measured the positions of the markers to situate the robot relative to its surroundings, feeding it back to the computer to register its location within the digital production space. Two additional cameras monitored the process to enable readjustment of the welding process in case deformation occurs. In this case, the relocation of data from physical to digital space, along with the actual manufacturing process, is fully automated to reduce labor, construction expertise. Similar to the In Situ Fabricator, we wanted to introduce a workflow where the computer integrates both the cutting process and the assembling logic such that humans are freed from the laborious work in construction and begin to undertake more creative works in construction sites.